信息通信技术与政策 ›› 2026, Vol. 52 ›› Issue (4): 53-63.doi: 10.12267/j.issn.2096-5931.2026.04.007
张恩皖1, 张其强2, 戴明艳1, 徐航1, 何文豪1
ZHANG Enwan1, ZHANG Qiqiang2, DAI Mingyan1, XU Hang1, HE Wenhao1
摘要:
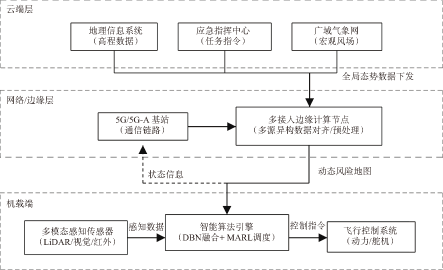
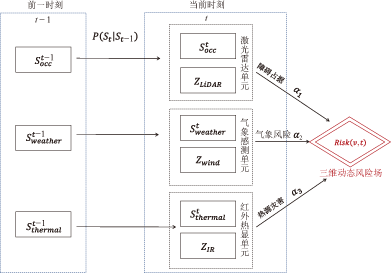
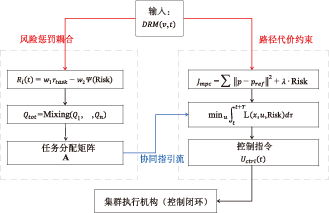
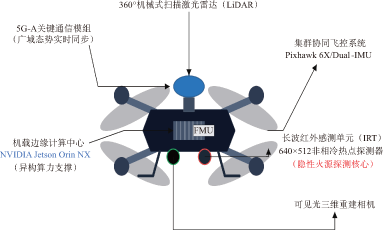
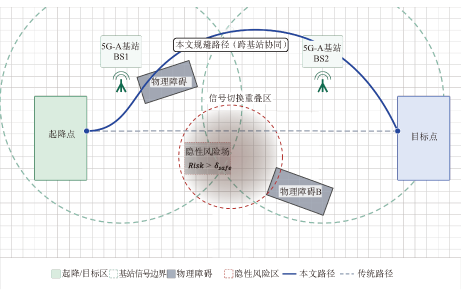
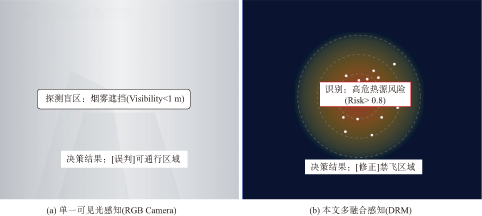
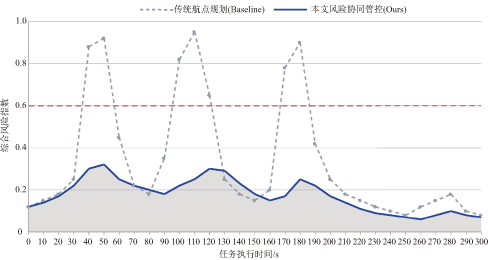
针对低空应急救援场景中环境复杂多变、多机协同调度困难及动态风险规避能力不足的问题,提出了一种融合多维态势感知的无人机集群智能协同管控技术。通过构建基于动态贝叶斯网络的异构信息融合模型,将机载传感数据与外部时空态势映射为三维动态风险地图。在此基础上,设计了风险耦合的多智能体强化学习调度策略与自适应路径规划方法,将量化风险值实时引入决策与规划闭环。外场试验结果表明,该方法能够显著提升对动态风险的感知精度,能够在复杂动态环境下有效提高无人机集群的任务成功率,缩短平均避障响应时间与任务完成总耗时,降低平均风险暴露时长,为构建安全高效的低空应急救援体系提供技术支撑。
中图分类号: