信息通信技术与政策 ›› 2026, Vol. 52 ›› Issue (1): 75-83.doi: 10.12267/j.issn.2096-5931.2026.01.010
于达1,2, 董晓飞1,2, 曹峰1,2, 查富生3, 孙立宁3
YU Da1,2, DONG Xiaofei1,2, CAO Feng1,2, ZHA Fusheng3, SUN Lining3
摘要:
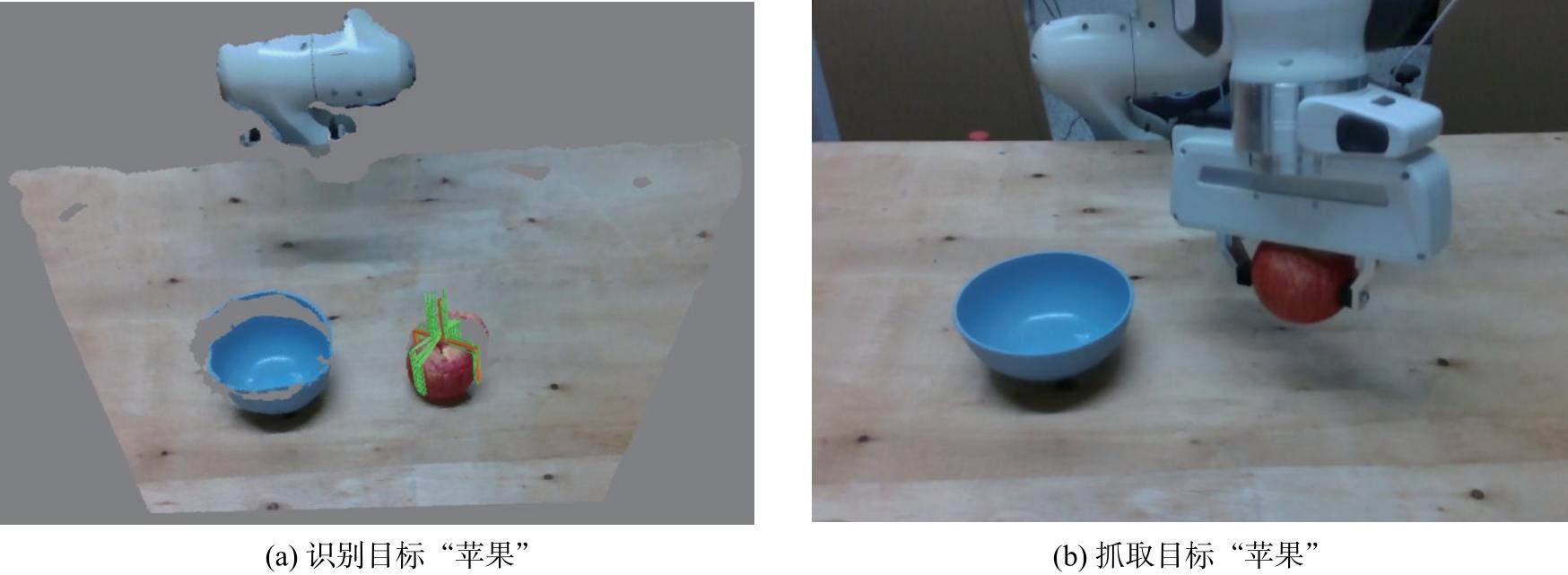
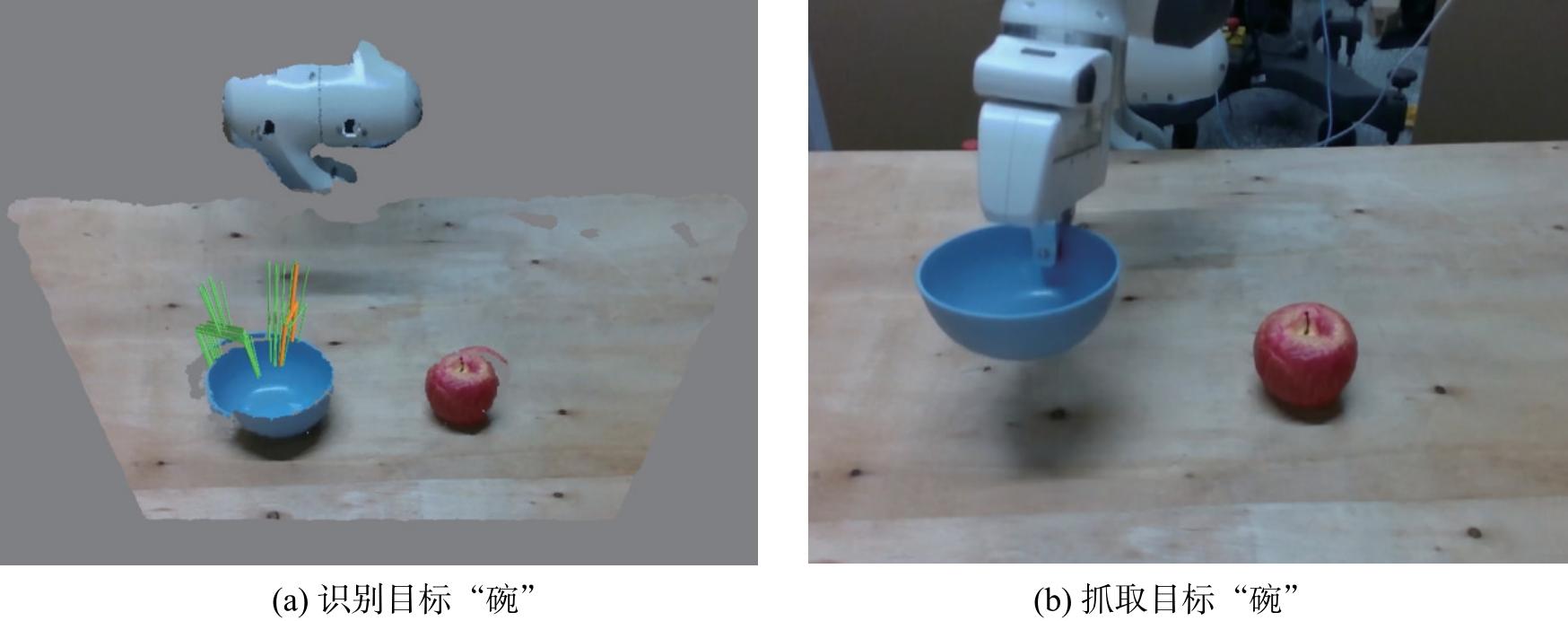
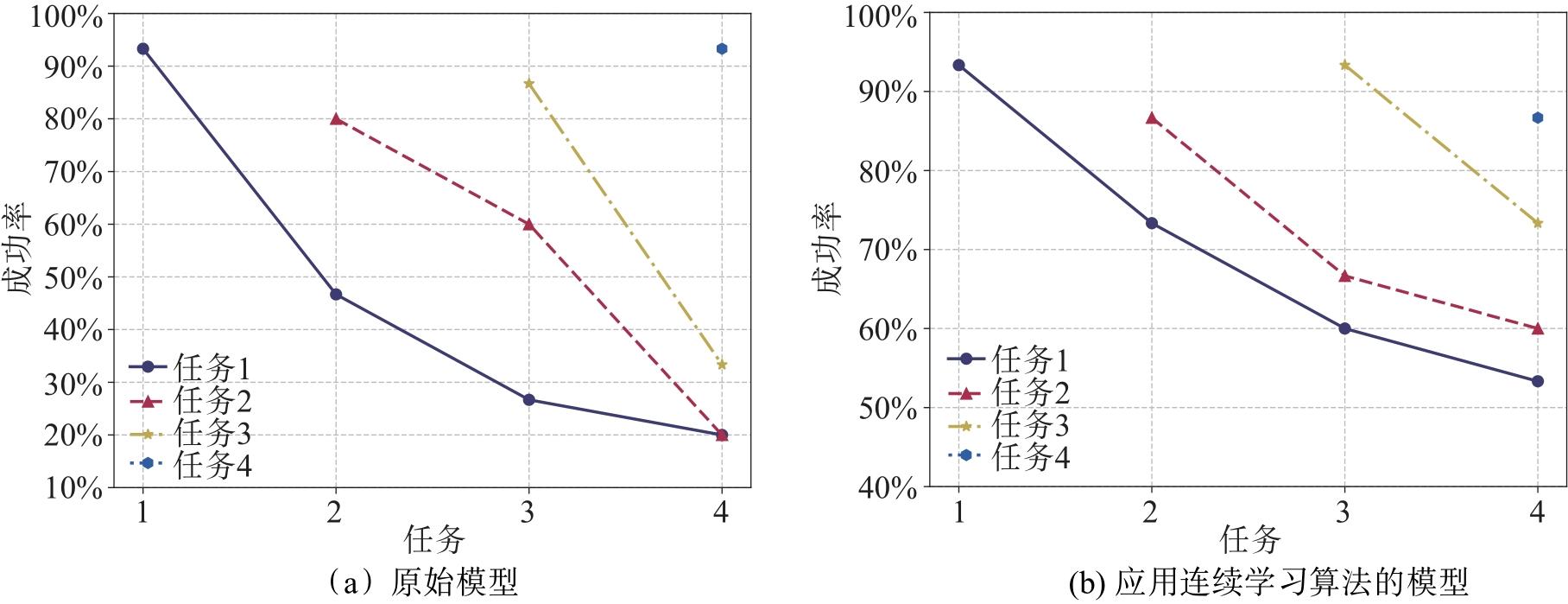
传统的人工神经网络训练通常聚焦于封闭、静态的独立同分布数据,并在完成离线训练后执行单一任务。然而,当数据分布随环境不断变化时,模型会忘记在先前任务中学到的知识,即发生“灾难性遗忘”。连续学习作为一个新的学习范式,旨在赋予模型从分布不断变化的数据流中持续学习、累计和巩固知识的能力,使得人工神经网络达到“稳定性-可塑性”平衡,进而克服灾难性遗忘。通过深入分析当前连续学习算法的主要特点,搭建真实机器人实物验证平台,在机器人实物抓取场景下验证连续学习算法的有效性。试验结果表明,将对比相关性保留回放算法应用到机器人实物抓取任务,抓取任务的平均准确率提高26.67%,能更好地帮助机器人执行目标任务。
中图分类号: